(四)调整PID控制器参数的指南 |
您所在的位置:网站首页 › simulink pid tune › (四)调整PID控制器参数的指南 |
(四)调整PID控制器参数的指南
|
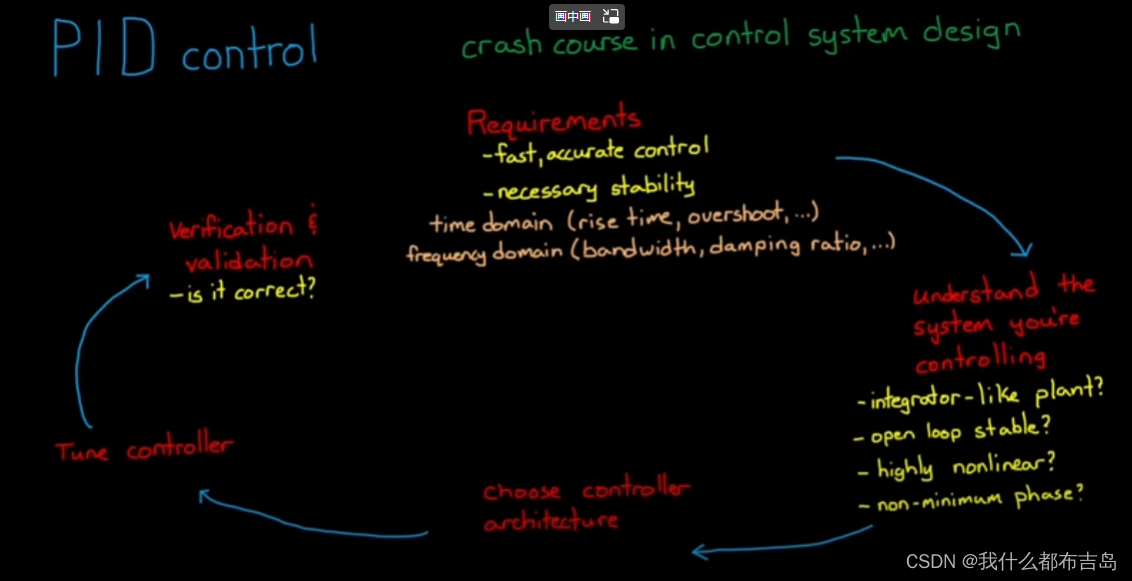
一、控制系统设计快速入门和环境
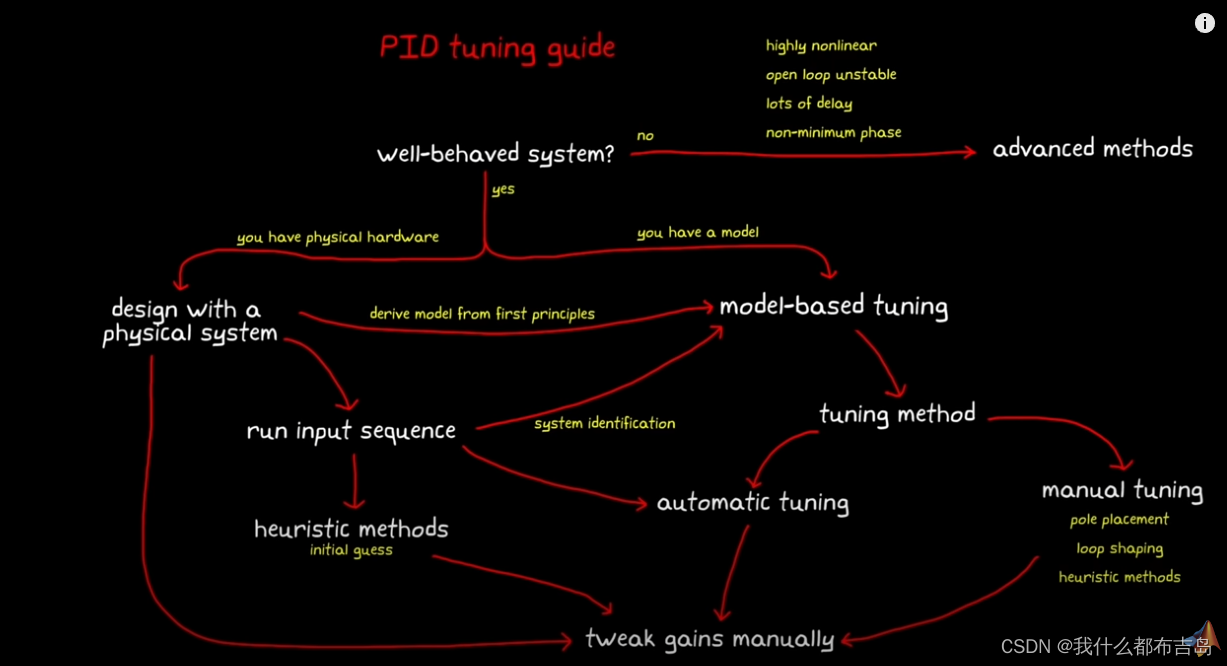
有很多方法可以用来整定PID控制器: 手动调整。该方法是通过调整者对控制理论的知识和经验,手动调节PID控制器参数,也就是根据系统的响应、稳态误差和振荡情况,逐步调整比例系数、积分时间、微分时间以达到所需的控制效果;基于规则调整。这种方法依赖于已经确定的经验法。比如Ziegler-Nichols就是一种基于规则的整定方法,根据系统的临界阻尼振荡响应来确定合适的PID参数;自动调整。使用软件或自动化工具进行PID自动调整。这些工具可以根据系统的输入-输出数据,使用优化的算法或者系统辨识技术来自动调整PID参数,常见的方法如遗传算法、粒子群优化等 2.1 手动或者基于规则调整手动调整,比如说使用开环传递函数。这种方法可能需要迭代多次且有很多缺点。比如,耗时、潜在的损坏硬件的可能性;基于规则的调整方法,比如说Ziegler-Nichols和Cohen-Coon,其缺点则是对于某些控制对象无效,比如不稳定对象、高阶对象,或者没有或者很少的时间延迟。 你可以使用软件自动调整PID控制器增益。一个典型的自动PID的工作流如下: 从输入和输出测试数据中辨识控制模型PID控制建模(比如MATLAB中的PID对象或者Simulink中的PID控制块)自动迭代式调整PID各参数批处理多个控制器调整单输入单输出(SISO)PID控制器以及多回路(multiloop)PID控制器架构[1] 在传统的线性控制系统中,系统的传递函数通常被分解为最小相位(minimum phase)和非最小相位(non-minimum phase)两部分。最小相位系统具有良好的稳定性和因果性,它们对输入信号的响应能够快速衰减并达到稳定状态。非最小相位系统的响应可能会包含振荡或反向反馈,从而引入不希望的效应。 |

【本文地址】